Multi-Purpose Intelligent Vehicles
Little Red Rover
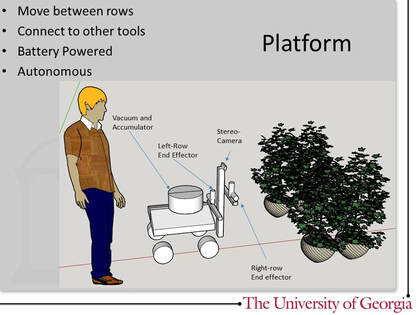
The little red rover (LRR)is an electric multi-purposed platform based on the Rabbit Tractors chassis. We will be able to conduct multiple field operations using a robotic arm and interchangeable attachments. The first image shows a conceptual picture of the LRR set to harvest cotton. The left and right end-effectors move to the cotton boll location and an active end-effector strips the cotton boll from the plant and a vacuum hose conveys it to a storage container (accumulator).
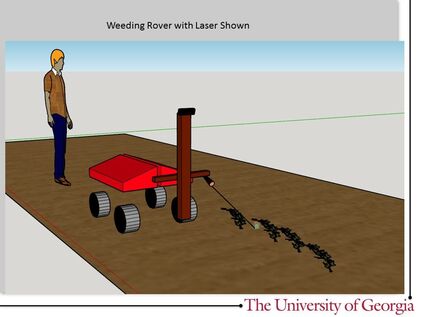
This artist rendition shows a laser end-effector lasing an intra-row weed. A stereo camera is used to image the weed, locate it in 3-D space. A Deep Learning Neural Network will be used to identify the weed and choose between llaser, herbicide spray or small tillage unit (not shown). Decision is made based on the identification of the weed, location of the weed and size of the weed.
Clifford - Big Red Rover
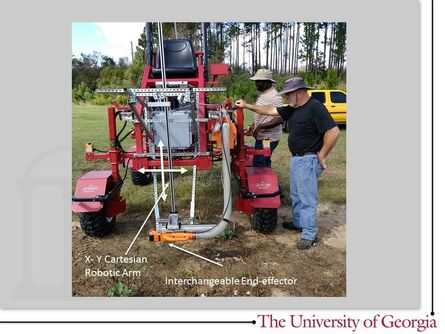
Clifford is a larger platform that runs on a 20 HP gasoline engine and hydrostatic drive. It is an articulated vehicle used to mount sensor suites and navigation systems for testing. We are currently using a Cartesian robotic arm and vacuum to harvest cotton (in picture). The robotic arm can be programmed and fitted with other end-effectors for planting, weeding, etc.. and will be adapted for the little red rover platform.
Bibliography
- Fue, K., Barnes, E., Porter, W., and Rains, G.C., (2019). Ensemble Method of Deep Learning, Color Segmentation, and Image Transformation to Track and Count Bolls using a Moving Camera in Real-time. Transactions of ASABE. St Joseph, MI: ASABE. (In Review)
- Ceren, R., Quinn, S., Rains, G. (2019). Towards a Decentralized, Autonomous Multi-Agent Framework for Mitigating Crop Loss, arXiv:1901.02035v1.
- Barnes, E., Hake, K., Griffin, T., Rains, G., Maja, J., Thomasson, J., Griffin, J., Pelletier, M., Bruce, M., Fue, K., Kimura, E., Morgan, G., Devine, J., Ibendahl, G., & Ayre, B.(2019). Initial Possibilities for Robotic Cotton Harvest. In 2019 Beltwide Cotton Conferences, New Orleans, Louisiana. Paper No. 19370. Cordova, TN: NCC
- Fue, K., Barnes, E., Porter, W., and Rains, G.C., (2019). Visual Control of Cotton-picking Rover and Manipulator using a ROS-independent Finite State Machine. In 2019 ASABE Annual International Meeting, Boston, Massachusetts (pp. 1-16). Paper No. 1900779. St Joseph, MI: ASABE.
- Ahlin, K., Bazemore, B., Boots, B., Burnham, J., Dellaert, F., Dong, J., Hu, A., Joffe, B., McMurray, G., Rains, G.C., Sadegh, N. (2018). Robotics for Spatially and Temporally Unstructured Agricultural Environments, In: Robotics and Mechatronics for Agriculture: Chapter 3, Boca Raton, FL: CRC Press.
- Dong, J, Burnham JG, Boots, B, Rains, GC, Dellaert F. (2017). 4D Crop Monitoring: Spatio-Temporal Reconstruction for Agriculture. Proceedings of 2017 IEEE International Conference on Robotics and Automation (ICRA).
- Rains, G. C., Bazemore, B. W., Ahlin, K., Hu, A. P., Sadegh, N., & McMurray, G. (2015). Steps toward an Autonomous Field Scout and Sampling System. In Paper #152190771 (pp. 1-15). Agricultural and Biological Engineering (ASABE) International conference, New Orleans, LA.
- Carlone, L., J. Dong, S. Fenu, GC Rains, F. Dellaert, 2015., Toward 4D crop analysis in precision agriculture: Estimating plant height and crown radius over time via expectation-maximization – Extended Abstract., IEEE ICRA Conference, May 26-30, Workshop on Robotics in Agriculture, Seattle Washington, 2015
- Rains, GC, Faircloth, AG, Thai, C, Raper, RL. 2014. Technical Note: Evaluation of a Simple Pure Pursuit Path-Following Algorithm for an Autonomous, Articulated-steer Vehicle, Applied Engineering in Agriculture, 30:367-374.
- McCarthy, S.G., Pocknee, S., Rains, GC, Kvien, C., 2004. Path-Following Studies with an Articulated farm vehicle, Automation Technology for Off-Road Equipment, Proceedings of the 7-8 October 2004 Conference (Kyoto, Japan)Publication Date: 7 October 2004.
- Faircloth, AG., 2004. Dynamic Evaluation of Three GPS Receivers on the Control and Performance of an Autonomous Vehicle developed with Pure- Pursuit System Architecture, UGA Masters Thesis, 2004, Athens, GA.
- Pocknee, S, S McCarthy, G Rains, C Kvien. 2004. Experiences with the Omnistar HP Differential Correction Service on an Autonomous Agricultural Vehicle, ION AM 2004 Conference, Dayton Ohio.
